







荷重とモーメント
リニアシステムには荷重として、下記のような荷重がかかります。
更にモーメントがかかることがあり、NBでは各方向の荷重を以下のように表します。
荷重 |
 |
モーメントの方向 |
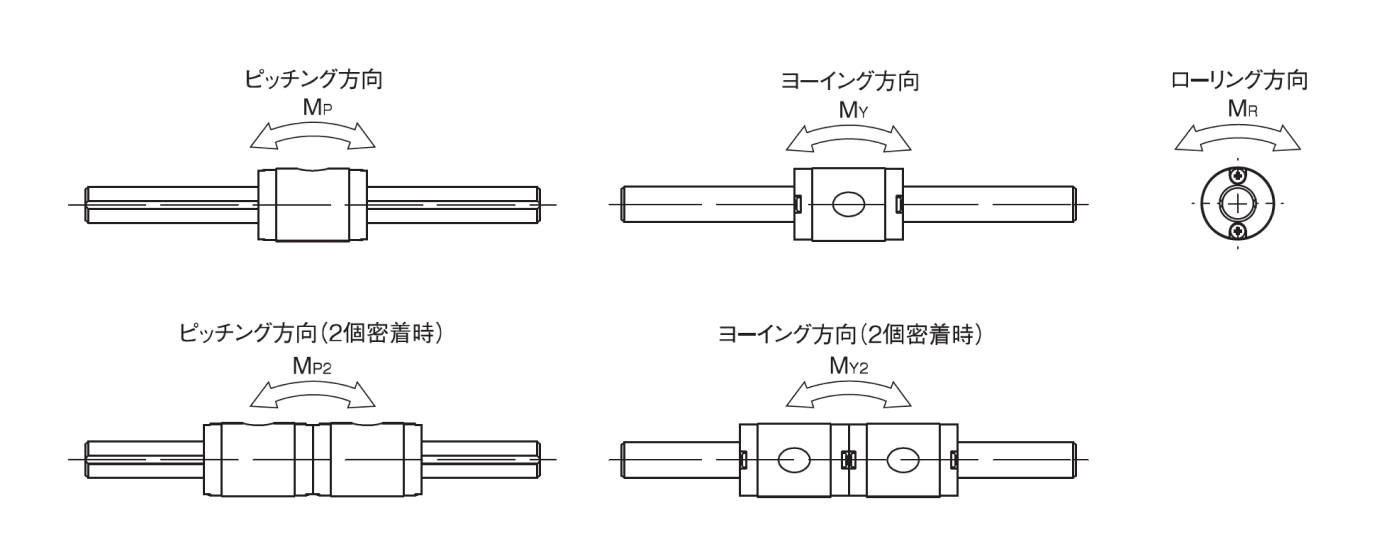 |
基本静定格荷重(ISO14728-2準拠※1)と静的許容モーメント
静止時や低速運動時にリニアシステムが過大な荷重や衝撃荷重を受けると軌道面と転動体の間に局部的な永久変形が生じ、この変形がある限度を越えると走行時の振動・騒音等の原因となり、リニアシステムの円滑な運動を損ね、寿命の低下にもつながります。そこで、永久変形量を抑え、リニアシステムの精度・寿命に影響を及ぼさないように、許容荷重として基本静定格荷重 (Co)が定められています。基本静定格荷重は最大応力を受けている転動体と軌道面の接触部中央に一定の接触応力を与える方向が一定の静止荷重と定義され、その時の転動体と軌道面の永久変形量の和は、転動体の直径のおよそ0.0001倍になります。リニアシステムには荷重だけでなくモーメントが加わることもありますので、同様に静的許容モーメントMP・MY・MRが定められています。
※1 一部製品で適用していないものがあります。
許容荷重と静的安全係数
基本静定格荷重および静的許容モーメントは静止荷重の各方向の限界値とされますが、使用条件や取付精度、更に必要とする運動精度によっては必ずしも満足できる値ではありません。したがって実際の使用では安全係数を考慮した許容荷重を求める必要があります。静的安全係数は一般的に表1−1の値を下限としています。

静的安全係数(fs)の下限
| 運転条件 | 静的安全係数 |
| 普通の運転条件の場合 | 1〜2 |
| 円滑な走行性能が必要な場合 | 2〜4 |
| 振動・衝撃がある場合 | 3〜5 |